Analog Devices has made an addition to its iSensor MEMS inertial measurement unit (IMU) product range with the ADIS16480. This latest addition is a MEMS IMU with 10-degree-of-freedom (DoF) and incorporates a sensor fusion algorithm. It also employs the ADSP-BF512 Blackfin as an integrated core processor.
 ADIS16480 iSensor MEMS IMU
ADIS16480 iSensor MEMS IMU
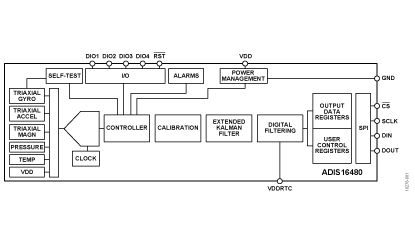
In addition, a pressure sensor, tri-axis gyroscope, tri-axis magnetometer and tri-axis accelerometer are all incorporated with the processor as a single package.
The ADIS16480 also comprises an integrated extended Kalman filter (EKF). The Kalman filter employs a mathematical algorithm to determine the state of a complex, dynamic and noisy process by collecting inputs over a period of time and fuses them to provide precise state. As an integrated part of the ADIS16480, the EKF collects the motion sensor inputs from the MEMS IMU to accurately predict position even under unpredictable operating conditions. The presence of an embedded processor facilitates quicker and economical processing in comparison to devices with external MEMS IMU. System level designers are also allowed the flexibility to tune the EKF through the programmable interface or let the filter adjust autonomously. The ADIS16480 has a bandwidth of 330-MHz that is six times greater than rival sensors. Low sensitivity to thermal drift and reduction in development and integration time are achieved by factory calibration of each and every MEMS IMU. The device has a fast start up time of 500 ms and a shock survival capacity of 2000 g.
The features of ADIS16480 make it ideal for applications requiring real-time positioning such as commercial and military aircraft navigation, industrial robotics, positioning of movable platforms and navigation of unmanned vehicles. The device is already in production and is priced at $1545 per 1k units.