From the world of nanotechnology we’ve gotten electronic skin, or e-skin, and electronic eye implants or e-eyes. Now we’re on the verge of electronic whiskers. Researchers with Berkeley Lab and the University of California (UC) Berkeley have created tactile sensors from composite films of carbon nanotubes and silver nanoparticles similar to the highly sensitive whiskers of cats and rats. These new e-whiskers respond to pressure as slight as a single Pascal, about the pressure exerted on a table surface by a dollar bill. Among their many potential applications is giving robots new abilities to “see” and “feel” their surrounding environment.
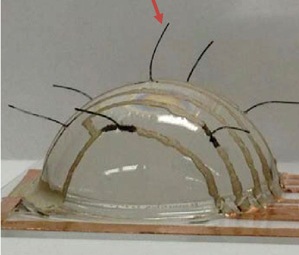 An array of seven vertically placed e-whiskers was used for 3D mapping of the wind by Ali Javey and his group.
An array of seven vertically placed e-whiskers was used for 3D mapping of the wind by Ali Javey and his group.
“Whiskers are hair-like tactile sensors used by certain mammals and insects to monitor wind and navigate around obstacles in tight spaces,” says the leader of this research Ali Javey, a faculty scientist in Berkeley Lab’s Materials Sciences Division and a UC Berkeley professor of electrical engineering and computer science. “Our electronic whiskers consist of high-aspect-ratio elastic fibers coated with conductive composite films of nanotubes and nanoparticles. In tests, these whiskers were 10 times more sensitive to pressure than all previously reported capacitive or resistive pressure sensors.”
Javey and his research group have been leaders in the development of e-skin and other flexible electronic devices that can interface with the environment. In this latest effort, they used a carbon nanotube paste to form an electrically conductive network matrix with excellent bendability. To this carbon nanotube matrix they loaded a thin film of silver nanoparticles that endowed the matrix with high sensitivity to mechanical strain.
“The strain sensitivity and electrical resistivity of our composite film is readily tuned by changing the composition ratio of the carbon nanotubes and the silver nanoparticles,” Javey says. “The composite can then be painted or printed onto high-aspect-ratio elastic fibers to form e-whiskers that can be integrated with different user-interactive systems.”
Javey notes that the use of elastic fibers with a small spring constant as the structural component of the whiskers provides large deflection and therefore high strain in response to the smallest applied pressures. As proof-of-concept, he and his research group successfully used their e-whiskers to demonstrate highly accurate 2D and 3D mapping of wind flow. In the future, e-whiskers could be used to mediate tactile sensing for the spatial mapping of nearby objects, and could also lead to wearable sensors for measuring heartbeat and pulse rate.
“Our e-whiskers represent a new type of highly responsive tactile sensor networks for real time monitoring of environmental effects,” Javey says. “The ease of fabrication, light weight and excellent performance of our e-whiskers should have a wide range of applications for advanced robotics, human-machine user interfaces, and biological applications.”
A paper describing this research has been published in the Proceedings of the National Academy of Sciences. The paper is titled “Highly sensitive electronic whiskers based on patterned carbon nanotube and silver nanoparticle composite films.” Javey is the corresponding author. Co-authors are Kuniharu Takei, Zhibin Yu, Maxwell Zheng, Hiroki Ota and Toshitake Takahashi.
This research was supported by the Defense Advanced Research Projects Agency.
Source: http://www.lbl.gov/