A new review shows how magnetism and light could give microscopic robots the control, adaptability, and multifunctional power needed for next-generation medicine and environmental cleanup.
Topical Review: Micro/nanorobots at the crossroads of magnetism and light. Image Credit: AI-generated image / OpenAI
A recent review published in the journal Nanotechnology examines the rapidly growing field of hybrid micro- and nanorobots that combine magnetic and light-driven actuation. These miniature robotic systems integrate the precise controllability of magnetic fields with the multifunctional capabilities of photoactive materials. The review highlights how combining magnetism and light helps compensate for key limitations of individual propulsion strategies and opens new opportunities in biomedicine and environmental remediation.
Emergence of Hybrid Micro/Nanorobots
Micro- and nanorobots have emerged as a promising class of active materials capable of operating in environments inaccessible to conventional robotic systems. Unlike their macroscale counterparts, these tiny devices cannot accommodate onboard electronics or power sources due to their extremely small size. Their functionality is embedded within the physicochemical properties of their constituent materials, allowing them to interact with their surroundings and perform complex tasks.
Early systems relied on hydrogen peroxide, but its toxicity, limited shelf life, and poor motion control limited its practical applications. As a result, externally actuated robots powered by magnetic, optical, acoustic, or electric fields have gained increasing interest. Among these, magnetic and light-driven propulsion are particularly attractive due to their remote controllability and environmental adaptability, with magnetic systems operating without local fuel and many light-driven designs reducing reliance on chemical fuels. The review explores how the synergy between magnetism and light enables the development of advanced, multifunctional micro- and nanorobotic systems.
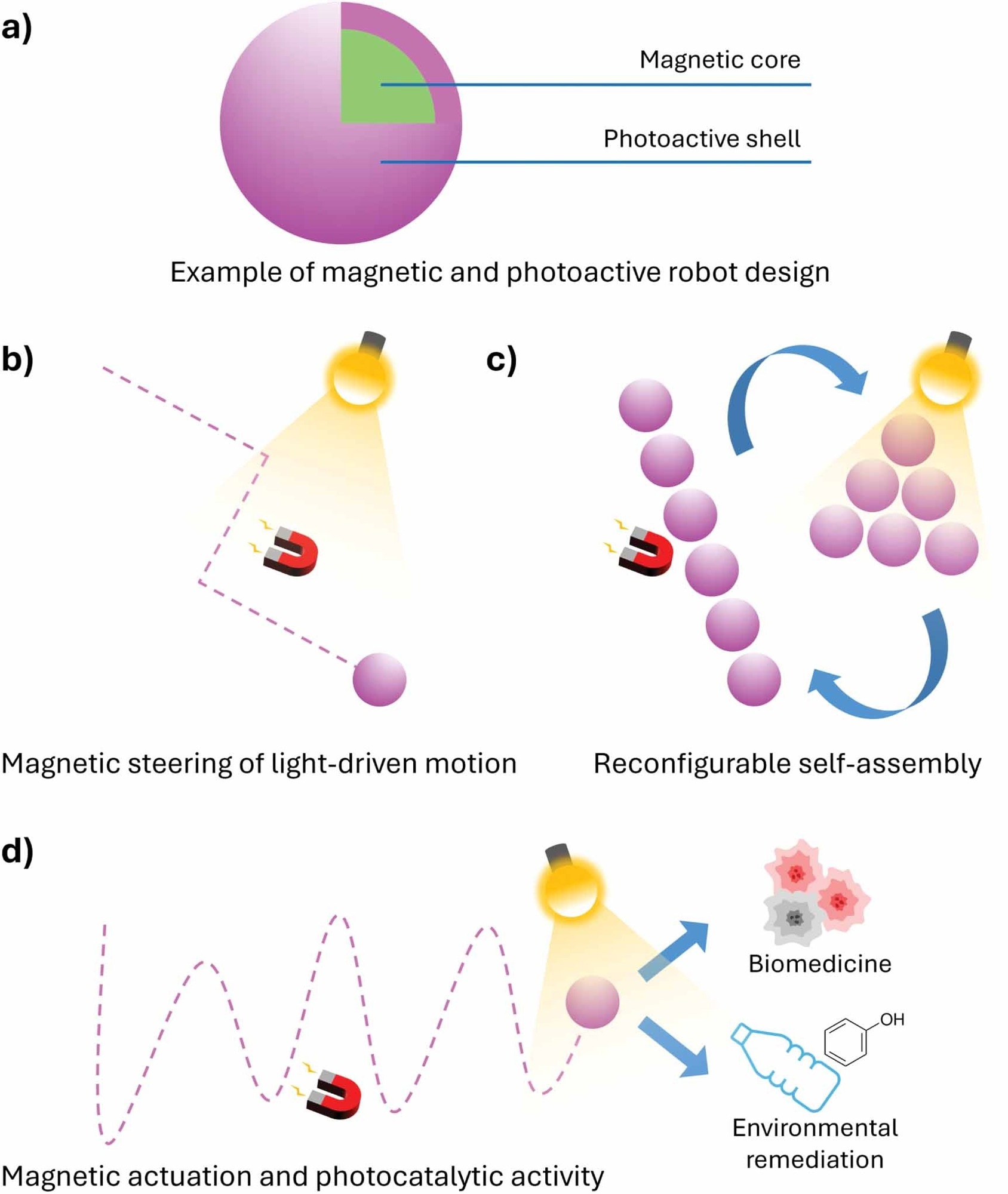
Illustrations of the main approaches for dual magnetic optical actuation of micro- and nanorobots. (a) A design of a robot harbouring both magnetic properties and photoactivity, where a magnetic core is surrounded by a photoactive shell. (b) A robot whose motion is powered by light and steered by magnetic fields. (c) Reconfiguration of a robot swarm in the absence/presence of light or magnetic fields. (d) Magnetic motion and light-activated function of a robot applied for targeted tumour therapy in biomedicine or the photocatalytic degradation of water pollutants in environmental remediation.
Fundamentals of Magnetic and Optical Actuation
Magnetic actuation is one of the most established methods for controlling micro- and nanorobots. External magnetic fields can remotely manipulate robot orientation, velocity, and trajectory with high precision. Magnetic fields penetrate biological tissues and opaque media without significant attenuation. Helical microrobots convert rotational motion into forward propulsion, mimicking bacterial flagella and enabling efficient navigation in viscous environments.
Light-driven propulsion relies on photoactive materials capable of converting light energy into motion through photochemical or photothermal processes. Upon illumination, these materials generate chemical, ionic, or thermal gradients around the particle, creating self-phoretic motion, although some designs still use small amounts of hydrogen peroxide as a co-fuel to boost speed. Light-powered robots benefit from wireless activation, tunable response, and compatibility with renewable energy sources such as sunlight. However, their effectiveness is limited by light scattering and absorption, and by reduced performance in highly ionic environments; however, specific material strategies, including polyelectrolyte coatings and porous carbon nitride microswimmers, can mitigate some of these constraints.
The review highlights the complementary nature of magnetic and optical actuation. Magnetic fields provide robust, deterministic, and reversible control, whereas light-driven mechanisms can be more variable but offer selective activation and additional photocatalytic or photothermal functions. Their integration enables hybrid robotic systems that can tune motion behavior while helping address the limitations of individual actuation strategies.
Hybrid Magneto-Optical Design Strategies
The review identifies several design strategies for combining magnetic and optical functionalities within a single robotic platform. One strategy combines magnetic materials with photoactive components, enabling magnetic navigation alongside photocatalytic, photothermal, or sensing functions. Examples such as BiOI/Fe3O4 and Fe3O4/Bi2O3/Ag microrobots demonstrate enhanced mobility and operational efficiency through this dual functionality.
Another strategy involves light-driven propulsion with magnetic steering, in which photocatalytic reactions generate autonomous motion, while magnetic fields control orientation and direction. Examples such as hematite-based microrobots and TiO2/Ni/Au Janus micromotors demonstrate precise navigation and programmable trajectories by decoupling propulsion and steering. This separation of propulsion and navigation enables more independent control of speed and direction, supporting programmable trajectories and improved flexibility in complex environments.
The review also highlights magnetic self-assembly coupled with light-driven motion. Magnetic interactions allow individual robots to assemble into chains, ribbons, or swarms, and illumination controls propulsion and reconfiguration. Such systems exhibit reversible transitions between dispersed and clustered states, driven by a balance between light-induced phoretic attraction and magnetic dipole-dipole interactions, and demonstrate adaptive collective behaviors inspired by natural swarms. These reconfigurable assemblies enhance transport efficiency, pollutant capture, and cooperative task performance.
Hybrid magneto-photoactive micro- and nanorobots show significant promise in biomedical applications. Magnetic guidance can enable precise navigation, while light-responsive materials enable targeted therapy. One notable example is MoSBOTs (Molybdenum Disulfide-Based Bio-templated Microrobots), which combine magnetic navigation with photothermal and photodynamic therapy as well as biotin biosensing. Under near-infrared light, they generate localized heat and reactive oxygen species (ROS) for targeted tumor ablation with the potential to localize treatment and reduce collateral damage to healthy tissues.
Other hybrid systems exploit photocatalytic and photo-Fenton reactions for cancer therapy. Dendrite-shaped α-Fe2O3 microrobots enhance ROS-mediated treatment by depleting intracellular glutathione, while magneto-plasmonic nanoparticles combine magnetic targeting with photothermal therapy for precise and minimally invasive tumor treatment.
Environmental remediation is another key application of hybrid micro- and nanorobots. Their active motion enhances interactions with contaminants, while photocatalytic materials generate reactive species that degrade pollutants. Magnetic functionality enables efficient recovery and reuse, with demonstrated applications in the removal of dyes, pesticides, sunscreen pollutants, and microplastics.
Examples include BiVO4/Fe3O4 microrobots for pollutant capture and degradation, magnetically guided photoactive microswarms for microplastic removal, and BiOI-based microrobots that generate reactive oxygen species (ROS) to break down sunscreen pollutants such as oxybenzone. These systems demonstrate how combining photocatalysis with magnetic navigation improves degradation efficiency, pollutant removal, and operational sustainability.
Advances, Challenges, and Future Opportunities
The review highlights the potential of combining magnetic and light-driven actuation in micro- and nanorobotic systems. Magnetic fields provide precise navigation, robust propulsion, and penetration through biological, opaque, and ionic media. In contrast, light enables selective activation and introduces photocatalytic and photothermal functionalities. As a result, hybrid micro- and nanorobots offer capabilities that are difficult to achieve using a single actuation strategy.
Despite significant progress, several challenges, such as fabrication scalability, system complexity, long-term stability, biocompatibility, portable actuation hardware, and real-world deployment, continue to limit broader adoption. Researchers are actively addressing these issues through advances in materials science, robotics, and photonics, including complete sensing architectures that could capture and preconcentrate analytes from blood, saliva, or contaminated water before portable electrochemical or optical detection.
Future systems may incorporate biodegradable materials, biohybrid components, portable actuation platforms, and intelligent swarm behaviors. These developments could help move hybrid micro- and nanorobots beyond laboratory proof-of-concept studies toward practical technologies for biomedical and environmental applications.
Download your PDF copy by clicking here.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.