Apr 5 2019
Deoxyribonucleic acid (DNA)-based nanowalkers are a class of molecular motors which are being explored for a wide range of potential nanoscale applications. This includes automated sequence dependent synthesis, nanoscale assembly lines and walker-guided surface patterning.
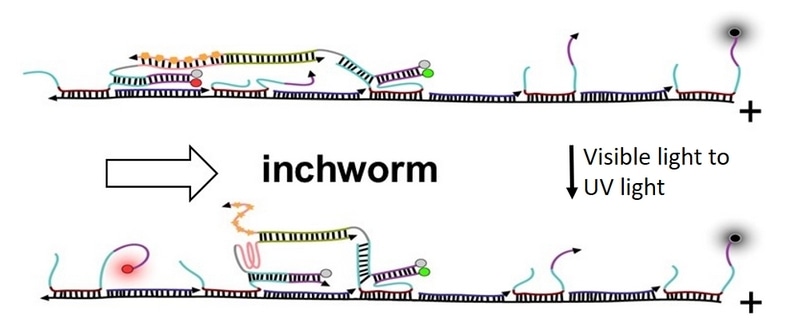 Illustration of a bipedal nanowalker moving like a crawling worm along a track. The nanowalker has two identical single-stranded DNA legs (shown as three-segment curve colored in purple, cyan and grey successively). The two legs are connected by a double-helix DNA bridge together with an “engine” component (orange and pink) that contracts or elongates under alternating ultraviolet or visible light. The walker pulls the trailing leg forward upon contraction (as shown), and pushes the front leg forward upon elongation. Fluorescent molecules (red, green and black coloured spheres) tethered to different positions of the walking track are used to detect the nanowalker’s motion. [Credit: Nanoscale]
Illustration of a bipedal nanowalker moving like a crawling worm along a track. The nanowalker has two identical single-stranded DNA legs (shown as three-segment curve colored in purple, cyan and grey successively). The two legs are connected by a double-helix DNA bridge together with an “engine” component (orange and pink) that contracts or elongates under alternating ultraviolet or visible light. The walker pulls the trailing leg forward upon contraction (as shown), and pushes the front leg forward upon elongation. Fluorescent molecules (red, green and black coloured spheres) tethered to different positions of the walking track are used to detect the nanowalker’s motion. [Credit: Nanoscale]
A bipedal nanowalker may move along a track in either the forward or backward directions using different types of gaits (walking manner). It can adopt a hand-over-hand (HOH) gait in which the walker’s two legs alternately lead one another, or follow an inchworm (IW) gait in which one leg always leads the other, like a crawling worm. For the same nanowalker to be able to switch directions and have different types of gaits represents a higher level of nanoscopic motion control that remains challenging.
A team led by Prof WANG Zhisong from the Department of Physics, NUS has developed a bipedal nanowalker that can switch between the forward and backward motion and between HOH and IW gait by changing the walker’s stride size. The track which the DNA walker “walks” on is made of a periodic array of identical single-stranded DNA footholds separated by a double-helix spacer. The stride size of the walker is controlled by changing the length of this spacer. The research team found that when the spacer is short, the walker uses an IW gait and moves towards one direction of the DNA track. When the spacer is elongated, the walker moves in the opposite direction and changes to a HOH gait. When the spacer is further elongated, the walker continues to have a HOH gait but reverses direction again. These findings show that the walking manner and movement direction of the DNA walker can be controlled by modifying the stride size, which corresponds to the spacer length.
The DNA walker has two identical single-stranded “legs” connected together by a rigid molecular bridge that can change between a long double-helix structure and a short quadruplex structure under different lighting conditions. By alternating between ultraviolet and visible light, the DNA walker undergoes a reversible extension and contraction as it changes between the double-helix and quadruplex structures. Due to an asymmetry in the binding potential of its “legs” to the track, a walking motion is created when the DNA walker is pulled forward and backwards.
Prof Wang said, “In principle, both the energy supply and control of the spacer size could be incorporated into the molecular track to develop mechanically driven nanowalkers with well-controlled gait and direction. This could potentially be implemented by engineering the molecular tracks using atomic force microscopes or magnetic/ optical tweezers.”
Reference
Chiang YH; Tsai SL; Tee SR; Nair OL; Loh IY; Liu MH; Wang ZS*, "Inchworm bipedal nanowalker" NANOSCALE Volume: 10 Issue: 19 Pages: 9199-9211 DOI: 10.1039/c7nr09724g Published: 2018.